Замена LiDAR‑датчика Roborock Q5
LiDAR (система дальнего обнаружения и определения расстояния) — ключевой датчик для навигации и обнаружения препятствий. Если датчик работает неправильно, это может повлиять на способность робота‑пылесоса ориентироваться и обходить препятствия. Некорректная калибровка или смещение могут привести к неточным показаниям и проблемам навигации.
Регулярная очистка может помочь, но в некоторых случаях потребуется замена. Рекомендуется провести диагностику, чтобы убедиться, что проблема действительно в датчике.
Шаг 1

Выключите Roborock и установите устройство на ровную поверхность колесами вверх.
Разместите робот так, чтобы пятилучевая боковая щётка находилась внизу справа.
Шаг 2

Отверткой Phillips №2 ослабьте один улавливаемый винт боковой щётки.
Винт прикреплён к боковой щётке и не отделяется от неё.
Шаг 3


Поднимите боковую щётку вверх и снимите её.
Шаг 4



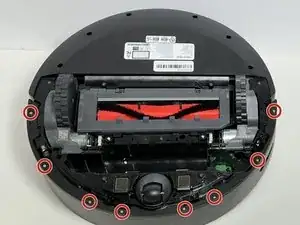
Отверткой Phillips снимите семь винтов 15 мм с нижней панели.
Шаг 5



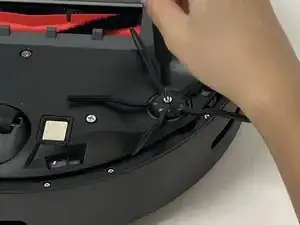
Осторожно снимите крышку нижней панели.
Если нижняя панель застряла, используйте пластиковую лопатку вдоль кромок, чтобы аккуратно приподнять её, затем снимите руками.
Шаг 6
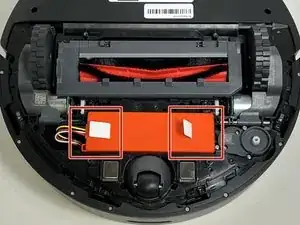

Используйте две белые ленты, чтобы немного поднять аккумулятор и получить доступ к разъёму батареи.
Аккумулятор всё ещё подключён к роботу‑пылесосу. Не натягивайте кабель аккумулятора.
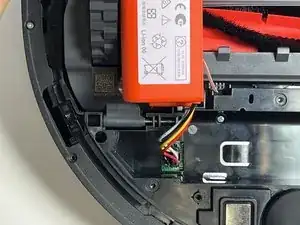
Шаг 7



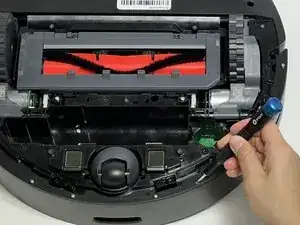
При умеренном давлении сожмите и потяните четырёхконтактный разъём, чтобы отключить аккумулятор от робота‑пылесоса.
Шаг 8


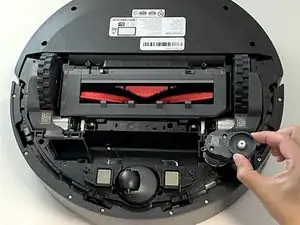
Снимите три винта Phillips 10 мм, которые крепят мотор боковой щётки.
Поднимите мотор боковой щётки и выведите его из посадочного места.
Шаг 9
Отверткой Phillips №1 снимите восемь винтов 11 мм с крышки передней панели датчиков.
Шаг 10


Осторожно приподнимите и снимите тонкий чёрный кронштейн корпуса датчика.
Оттяните крышку передней панели датчиков от робота.
Шаг 11
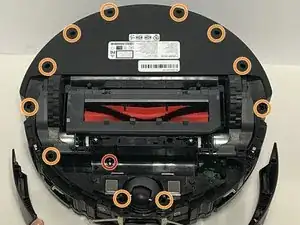
Отверткой Phillips снимите один винт 14 мм в корпусе аккумулятора.
Отверткой Phillips снимите одиннадцать глубоко расположенных винтов 14 мм с нижней панели.
Шаг 12

Аккуратно переверните устройство и поставьте его на место.
Сожмите вместе две защёлки пылесборника и потяните пылесборник вверх, чтобы извлечь его.
Шаг 13
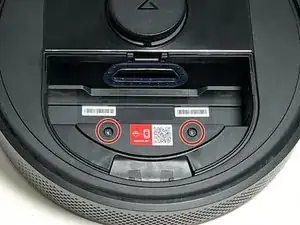

Отверткой Phillips №2 снимите два винта 15 мм с передней крышки панели.
Шаг 14



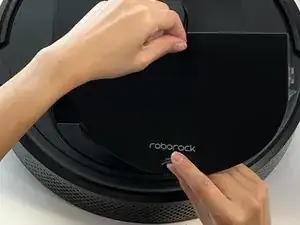
Осторожно приподнимите и снимите верхнюю крышку робота‑пылесоса.
Если верхняя панель застряла, используйте пластиковую лопатку вдоль кромок, чтобы аккуратно приподнять её, затем снимите руками.
Шаг 15
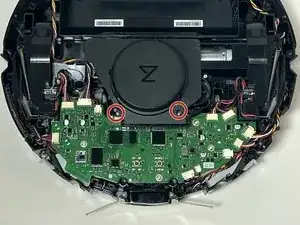


Отверткой Phillips №1 снимите два винта 10 мм с крышки LiDAR‑датчика.
Осторожно снимите крышку датчика.
Шаг 16
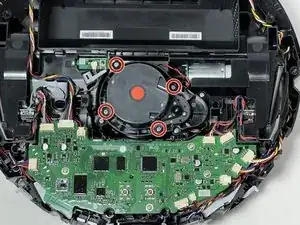

Отверткой Phillips №1 снимите четыре винта 9 мм, которые закрепляют LiDAR‑датчик.
Поднимите датчик из пылесоса.
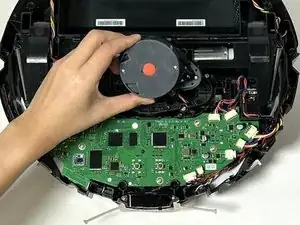
Шаг 17


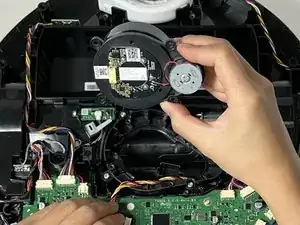
Возьмитесь за белый разъём кабеля LiDAR и потяните его прямо из гнезда.
Снимите LiDAR‑датчик.
Заключение
Для повторной сборки устройства выполните эти шаги в обратном порядке.
Перевод руководства с ifixit.com