Замена контроллера полёта Hubsan X4 107L
Hubsan X4 107L — прочный квадрокоптер начального уровня, идеально подходящий для любителей Р/У, изучающих пилотирование. Это полное руководство по разборке X4.
Шаг 1



Схватите батарею и выдвиньте её из корпуса квадрокоптера.
Не тяните за провода. Это может повредить батарею или контроллер полёта.
Шаг 2



Разместите квадрокоптер так, чтобы пропеллеры были внизу.
Снимите резиновые демпферы с креплений моторов вручную.
Шаг 3



Используйте инструмент для съёма пропеллеров, чтобы отжать пропеллеры от моторов.
Каждый пропеллер и луч моторa маркированы как «A» или «B» в зависимости от направления вращения мотора — по часовой или против часовой. При расположении квадрокоптера передней частью к вам:
Пропеллеры «A» установлены на переднем левом и заднем правом моторах.
Пропеллеры «B» установлены на переднем правом и заднем левом моторах.
Шаг 4

Используйте бокорезы, чтобы удалить любые самодельные или сторонние модификации, удерживающие корпус вместе.
Шаг 5



Используйте крестовую отвёртку PH#000, чтобы выкрутить три винта, удерживающие нижнюю часть корпуса на раме.
Шаг 6


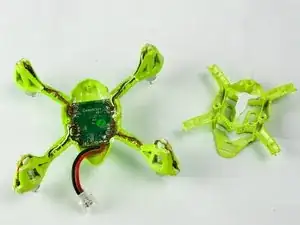
Аккуратно приложите вверх давление к одному из лучей мотора, одновременно сгибая корпус вниз, чтобы защёлкнуть нижнюю часть корпуса и вывести часть луча из посадочного места.
Повторите этот приём для всех четырёх лучей. Нижняя часть корпуса отделится от основной рамы после отсоединения четвёртого луча.
Возможно, придётся значительно согнуть луч, чтобы защёлкнуть его. Это конструктивная особенность прочности, позволяющая X4 «смять» корпус при краше, не ломаясь.
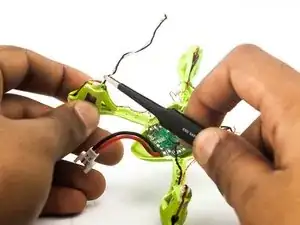
Шаг 7

Используйте паяльник и оплетку для выпаивания, чтобы припаять четыре мотора от платы управления.
Если соединение остаётся прочным даже после удаления припоя, аккуратно тяните за провод, одновременно нагревая контакт, пока провод не отделится от печатной платы.
Провода моторов идут парами: чёрно-белые или красно-синие.
ВНИМАНИЕ: Перегрев печатной платы может повредить дорожки, что затруднит или сделает невозможным повторное подключение компонентов. Не подавайте слишком много тепла на плату; эти дорожки особенно деликатны из‑за малого размера.
Шаг 8

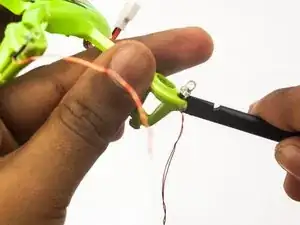
Используя технику, аналогичную выпаиванию проводов моторов, отключите светодиоды от платы управления.
Соединения светодиодов требуют меньше припоя, чем контакты моторов, поэтому оплетка для выпаивания опциональна, но не обязательна для этого шага.
При сборке квадрокоптера помните, что у светодиодов положительные выводы — красные, а отрицательные — бронзовые.
Шаг 9

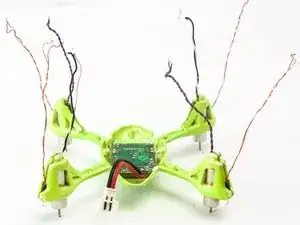
Используйте пинцет, чтобы продеть провода моторов и светодиодов через лучи квадрокоптера.
После продевания всех восьми пучков проводов светодиоды и моторы готовы к извлечению.
Шаг 10

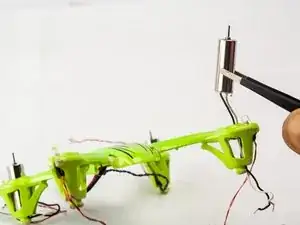

Используйте пинцет, чтобы выдавить моторы из их корпусов.
И крепления моторов, и сами моторы имеют небольшое различие размеров. Если мотор трудно выдавить, убедитесь, что провода не застряли в раме, и аккуратно увеличьте усилие снизу, пока мотор не начнёт сдвигаться.
Когда мотор частично выйдет из посадочного места, схватите его сверху и вытяните прямо наружу.
Шаг 11


Извлеките светодиоды, используя лопаточку, чтобы расширить их посадочные гнёзда и подтолкнуть их вверх.
Чтобы освободить светодиод из гнезда, вставьте лопаточку в верхнюю часть щели в пластике, обнажив боковую сторону светодиода.
Одновременно поверните лопаточку, чтобы расширить гнездо, и подталкивайте светодиод вверх и наружу из рамы.
Шаг 12

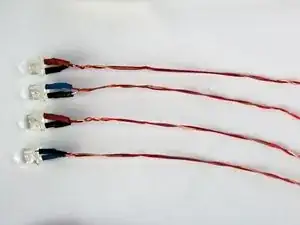
В отличие от моторов, у которых провода различались по цвету для определения направления вращения, у синих и красных светодиодов положительные выводы красные, а отрицательные — бронзовые. При более внимательном рассмотрении кажется, что термоусадка на положительном выводе соответствует цвету светодиода.
Шаг 13


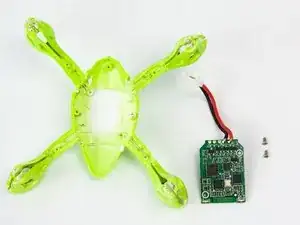
Используйте отвёртку PH000, чтобы выкрутить два винта, крепящих контроллер полёта к раме.
После удаления обоих винтов контроллер полёта свободно выходит из рамы.
Шаг 14


Контроллер полёта Hubsan X4 (также известная как плата управления) содержит ряд компонентов, обеспечивающих управление квадрокоптером:
Процессор Hubsan HBS002
Интегрированный трёхосевой гироскоп Invensense ITG-3050
Кварцевый резонатор 16.000 МГц
Акселерометр 3‑оси 3210AP
Беспроводной модуль A7105 2.4 ГГц
Шаг 15

Готово! Для сборки X4 выполните эти шаги в обратном порядке.
Это хорошая возможность проверить все светодиоды и моторы и заменить любые неисправные компоненты.
Заключение
Для сборки устройства выполните инструкции в обратном порядке.
Перевод руководства с ifixit.com